 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLF-Net: Learning Local Features from Images
May 24, 2018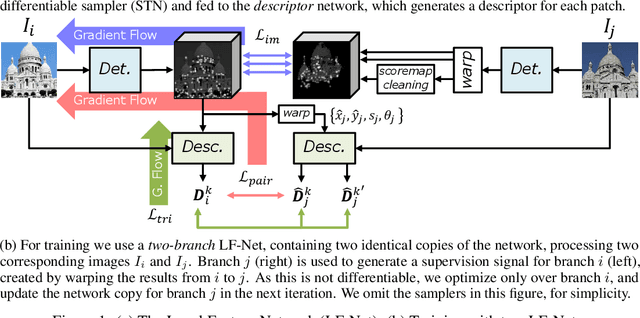
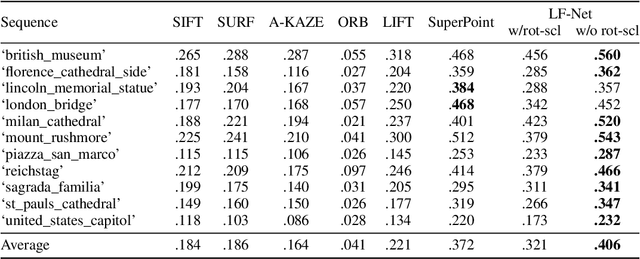

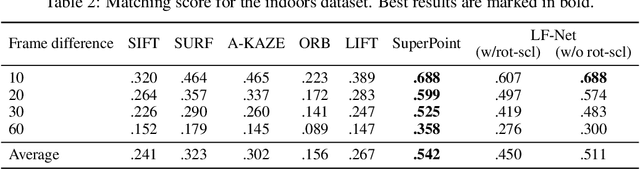
We present a novel deep architecture and a training strategy to learn a local feature pipeline from scratch, using collections of images without the need for human supervision. To do so we exploit depth and relative camera pose cues to create a virtual target that the network should achieve on one image, provided the outputs of the network for the other image. While this process is inherently non-differentiable, we show that we can optimize the network in a two-branch setup by confining it to one branch, while preserving differentiability in the other. We train our method on both indoor and outdoor datasets, with depth data from 3D sensors for the former, and depth estimates from an off-the-shelf Structure-from-Motion solution for the latter. Our models outperform the state of the art on sparse feature matching on both datasets, while running at 60+ fps for QVGA images.
Learning to Find Good Correspondences
May 21, 2018
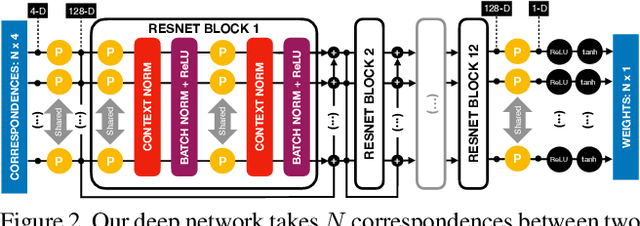
We develop a deep architecture to learn to find good correspondences for wide-baseline stereo. Given a set of putative sparse matches and the camera intrinsics, we train our network in an end-to-end fashion to label the correspondences as inliers or outliers, while simultaneously using them to recover the relative pose, as encoded by the essential matrix. Our architecture is based on a multi-layer perceptron operating on pixel coordinates rather than directly on the image, and is thus simple and small. We introduce a novel normalization technique, called Context Normalization, which allows us to process each data point separately while imbuing it with global information, and also makes the network invariant to the order of the correspondences. Our experiments on multiple challenging datasets demonstrate that our method is able to drastically improve the state of the art with little training data.